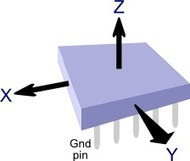
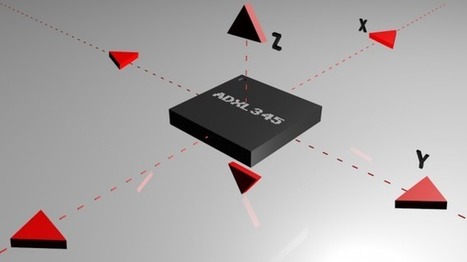
En esta entrada vamos a introducir el uso del acelerómetro como componente fundamental en nuestros proyectos de electrónica y Arduino. En la siguiente entrada ampliaremos al uso de giroscopios para, finalmente, terminar presentando el uso de IMU’s para calcular la orientación, por ejemplo, de un vehículo o robot.
En entradas anteriores hemos visto distintas opciones disponibles para dotar de movimiento a nuestros proyectos con Arduino mediante motores rotativos o accionadores lineales. También hemos analizad los factores a tener en cuenta para escoger uno u otro en nuestro proyecto.



 Your new post is loading...
Your new post is loading...